




















1.Pengantar Penggerak AC (Penggerak Frekuensi Variabel) Dalam ranah pengendalian industri modern dan......
BACA LEBIH LANJUT
Rumah / Berita / Berita Industri / Bagaimana cara memilih motor servo industri yang tepat untuk aplikasi saya?
Bagaimana cara memilih motor servo industri yang tepat untuk aplikasi saya?
1. Tentukan Kebutuhan Aplikasi Anda
Pertama, Anda perlu memiliki pemahaman mendalam tentang skenario aplikasi Anda. Tanyakan pada diri Anda pertanyaan-pertanyaan ini:
-
Tipe Gerak : Apakah aplikasi Anda memerlukan rotasi terus-menerus, gerakan bolak-balik, atau pemosisian yang tepat? Ini akan menentukan persyaratan kecepatan, torsi, dan akurasi.
-
Karakteristik Beban : Berapa berat beban yang perlu dikendarai? Apakah bebannya inersia atau konstan? Ini secara langsung berdampak pada torsi yang dibutuhkan.
-
Siklus Tugas : Apakah motor akan beroperasi terus menerus atau sebentar-sebentar? Berapa lama fase percepatan, kecepatan konstan, dan perlambatan berlangsung selama satu siklus kerja? Hal ini menentukan persyaratan pembuangan panas dan kapasitas beban berlebih motor.
-
Kondisi Lingkungan : Dalam lingkungan seperti apa motor akan beroperasi? Apakah ada suhu tinggi, kelembapan tinggi, debu, atau bahan kimia korosif? Faktor-faktor ini akan mempengaruhi peringkat perlindungan masuknya motor (IP) dan pemilihan material.
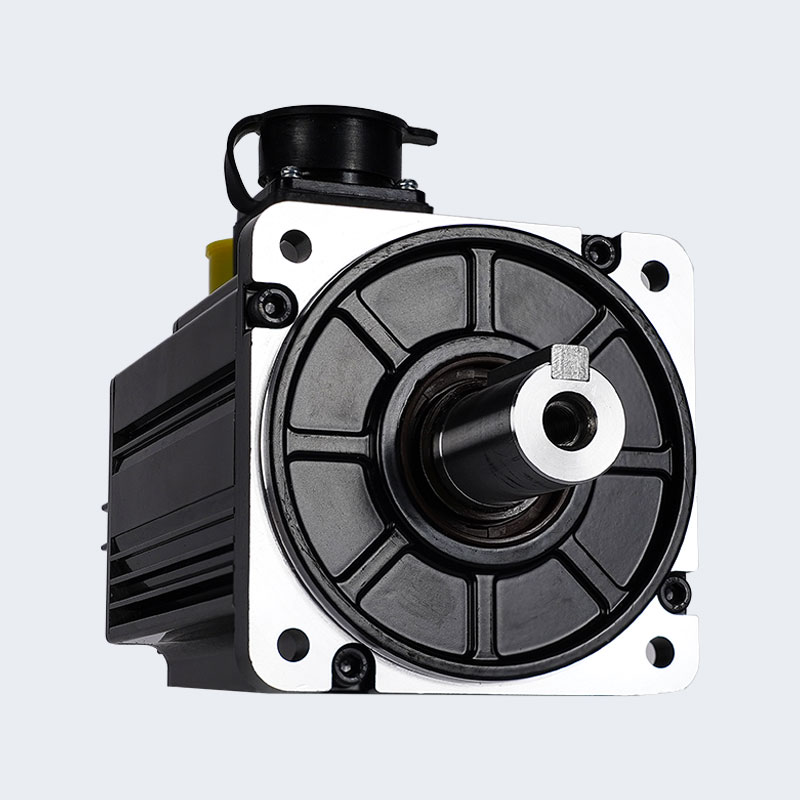
2. Pertimbangan Parameter Teknis Inti
Setelah mendapatkan pemahaman yang jelas tentang aplikasi Anda, Anda dapat mulai mengevaluasi parameter teknisnya motor servo .
sebuah. Torsi
Torsi adalah parameter utama saat memilih motor servo. Ini dikategorikan menjadi tiga jenis:
-
Torsi Terukur : Torsi yang dapat dihasilkan motor secara terus menerus pada kecepatan tetapannya. Ini adalah torsi yang Anda perlukan dalam kondisi pengoperasian normal.
-
Torsi Puncak : Torsi maksimum yang dapat dihasilkan motor dalam waktu singkat saat kelebihan beban. Ini penting untuk menangani permulaan, akselerasi, atau perubahan beban yang tiba-tiba. Pastikan torsi puncak motor memenuhi permintaan torsi sesaat maksimum aplikasi Anda.
-
Memegang Torsi : Dalam beberapa aplikasi, seperti aplikasi yang mengharuskan motor mempertahankan posisinya setelah kehilangan daya, menahan torsi sangatlah penting.
Perhitungan Torsi: Perhitungan torsi yang akurat perlu mempertimbangkan inersia beban, gesekan, gravitasi, dan torsi akselerasi/deselerasi. Anda dapat menggunakan perangkat lunak atau formula profesional untuk melakukan hal ini, dan umumnya disarankan untuk menyertakan margin keamanan 20-30%.
B. Kecepatan
Kecepatan juga merupakan faktor penting. Anda perlu tahu:
-
Kecepatan Terukur : Kecepatan dimana motor dapat beroperasi secara terus menerus dan stabil.
-
Kecepatan Maksimum : Kecepatan tertinggi yang dapat dicapai motor. Pastikan nilai ini memenuhi persyaratan aplikasi Anda, terutama dalam skenario yang memerlukan respons cepat.
C. Pencocokan Inersia
Pencocokan inersia adalah salah satu aspek yang paling mudah diabaikan, namun penting, dalam pemilihan a motor servo .
-
Secara teoritis , rasio pencocokan optimal biasanya 1:1.
-
Secara praktis , untuk sambungan kaku, rasio yang disarankan biasanya antara 3:1 dan 5:1. Untuk beban inersia tinggi, rasio ini bisa sedikit lebih tinggi, namun rasio yang terlalu tinggi (misalnya di atas 10:1) dapat membuat sistem sulit disetel, menyebabkan getaran, atau bahkan menyebabkan ketidakstabilan.
D. Perangkat Umpan Balik
Perangkat umpan balik adalah jantung dari kontrol presisi sistem servo. Jenis yang umum meliputi:
-
Pembuat enkode : Memberikan informasi posisi dan kecepatan. Resolusi yang lebih tinggi menghasilkan akurasi posisi yang lebih baik. Encoder inkremental dan absolut masing-masing memiliki kelebihan dan kekurangannya; yang pertama lebih murah tetapi memerlukan penempatan kembali setelah listrik padam, sedangkan yang kedua tidak.
-
Penyelesai : Berperforma lebih stabil di lingkungan yang keras (suhu tinggi, getaran) namun biasanya memiliki resolusi lebih rendah dibandingkan encoder.
3. Integrasi dan Kompatibilitas Sistem
Memilih a motor servo bukan hanya soal memilih motor itu sendiri; ini juga tentang mempertimbangkan kompatibilitasnya dengan keseluruhan sistem kontrol.
-
Penggerak Servo : Pastikan motor dan penggerak servo kompatibel, idealnya dari merek yang sama atau dengan kompatibilitas bersertifikat. Penggerak perlu menyediakan arus dan tegangan yang cukup untuk memberi daya pada motor dan mendukung mode kontrol yang diperlukan (misalnya, kontrol posisi, kecepatan, atau torsi).
-
Pengendali : Periksa apakah motor servo dan drive dapat berkomunikasi dengan pengontrol utama Anda (PLC, IPC, dll.). Protokol komunikasi umum termasuk EtherCAT, Profinet, dan CANopen.
-
Peringkat IP : Pilih peringkat IP yang sesuai berdasarkan lingkungan kerja Anda. Misalnya, IP65 atau IP67 biasanya digunakan di lingkungan berdebu atau basah.
Kesimpulan
Memilih industri yang tepat motor servo adalah proses sistematis yang memerlukan evaluasi komprehensif terhadap kebutuhan aplikasi, parameter teknis utama, dan kompatibilitas dengan keseluruhan sistem kendali. Kami merekomendasikan untuk berkolaborasi dengan pemasok atau teknisi profesional untuk menggunakan keahlian dan dukungan teknis mereka untuk perhitungan dan pemilihan yang akurat, memastikan peralatan otomatis Anda beroperasi secara efisien dan stabil.
Posting Sebelumnya
Apa aplikasi umum motor servo industri?
Posting Berikutnya
Apa perbedaan antara motor servo dan motor stepper?
Hak Cipta 2024 Fujian Raynen Technology Co, Ltd. Semua Hak Dilindungi Undang-undang.
Kebijakan Privasi 